
英雄机器人
自适应底盘设计:适应多种地形运动,避免轮子悬空空转导致功率浪费;
三摩擦轮设计:能够实现20m吊射42mm大弹丸打击大装甲板大小模块,命中率60%;实现自动瞄准打击7-8m旋转装甲板;
超级电容:四开关buck-boost 能实现300W稳定放电;
软件控制已实现功率控制、PID+跟踪微分器+前馈、利用弹道方程结合打击目标标定发射机构参数;
视觉部分实现YOLO v8关键点检测、PNP位姿解算。
英雄机器人
自适应底盘设计:适应多种地形运动,避免轮子悬空空转导致功率浪费;
三摩擦轮设计:能够实现20m吊射42mm大弹丸打击大装甲板大小模块,命中率60%;实现自动瞄准打击7-8m旋转装甲板;
超级电容:四开关buck-boost 能实现300W稳定放电;
软件控制已实现功率控制、PID+跟踪微分器+前馈、利用弹道方程结合打击目标标定发射机构参数;
视觉部分实现YOLO v8关键点检测、PNP位姿解算。

步兵机器人
多种底盘结构:全向轮、舵轮、轮腿;
FreeRTOS操作系统实现单片机伪多线程处理;
多轮组运动方程解算满足不同机器人底盘需求;
PID&ADRC实现云台精准控制。

哨兵机器人
全自动运行:卡尔曼运动融合多传感器数据,使机器人自我感知运动状态;
全自动导航:全自由度舵轮赋能精准里程计,结合激光雷达DLIO定位与PCL点云处理,机内实现大量点云处理;PCL可视化地图深度融合A*路径规划。

工程机器人
六轴机械臂,仿生手臂设计方便复杂地形物体获取;
电磁阀结合真空泵实现真空链路,实现物品轻易吸取;
并联机械臂结构,方便多目标简单获取。
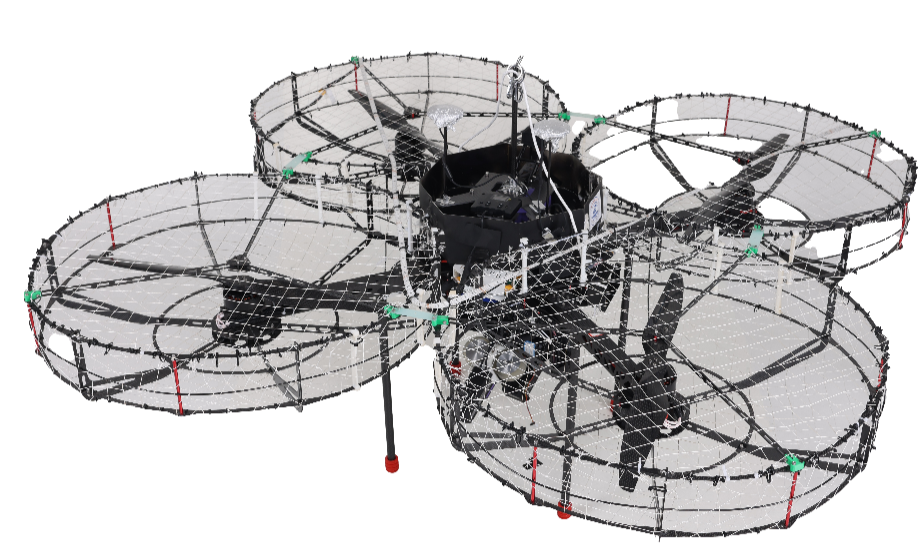
空中机器人
自主研发48V高功率供电板;
轻量化机身设计四轴多旋翼无人机;
Gidance视觉定位稳定悬停,非线性预测,飞控通道映射,助力稳定悬停。

飞镖机器人
多种方案并行验证,采用双极摩擦轮方案,摩擦轮温控系统,精确控制摩擦轮发射时条件一致性;
精确控制发射底座朝向,提升20m命中率。

雷达机器人
利用工业相机结合激光雷达实现多目标识别、定位和交互;
软件上基于Ubuntu平台实现YoloV8目标检测、目标定位、决策通信,点云聚类极限达50FPS。